Обзор и анализ конструкций движителей для перспективных российских луноходов
| Авторы: Наумов В.Н., Козлов О.Е., Машков К.Ю., Бяков К.Е. | Опубликовано: 11.07.2017 |
| Опубликовано в выпуске: #7(688)/2017 | |
| Раздел: Транспортное и энергетическое машиностроение | |
| Ключевые слова: коэффициент буксования, стенд испытания ходовой части, коэффициент тяги, упругие элементы, грунтозацепы колеса |
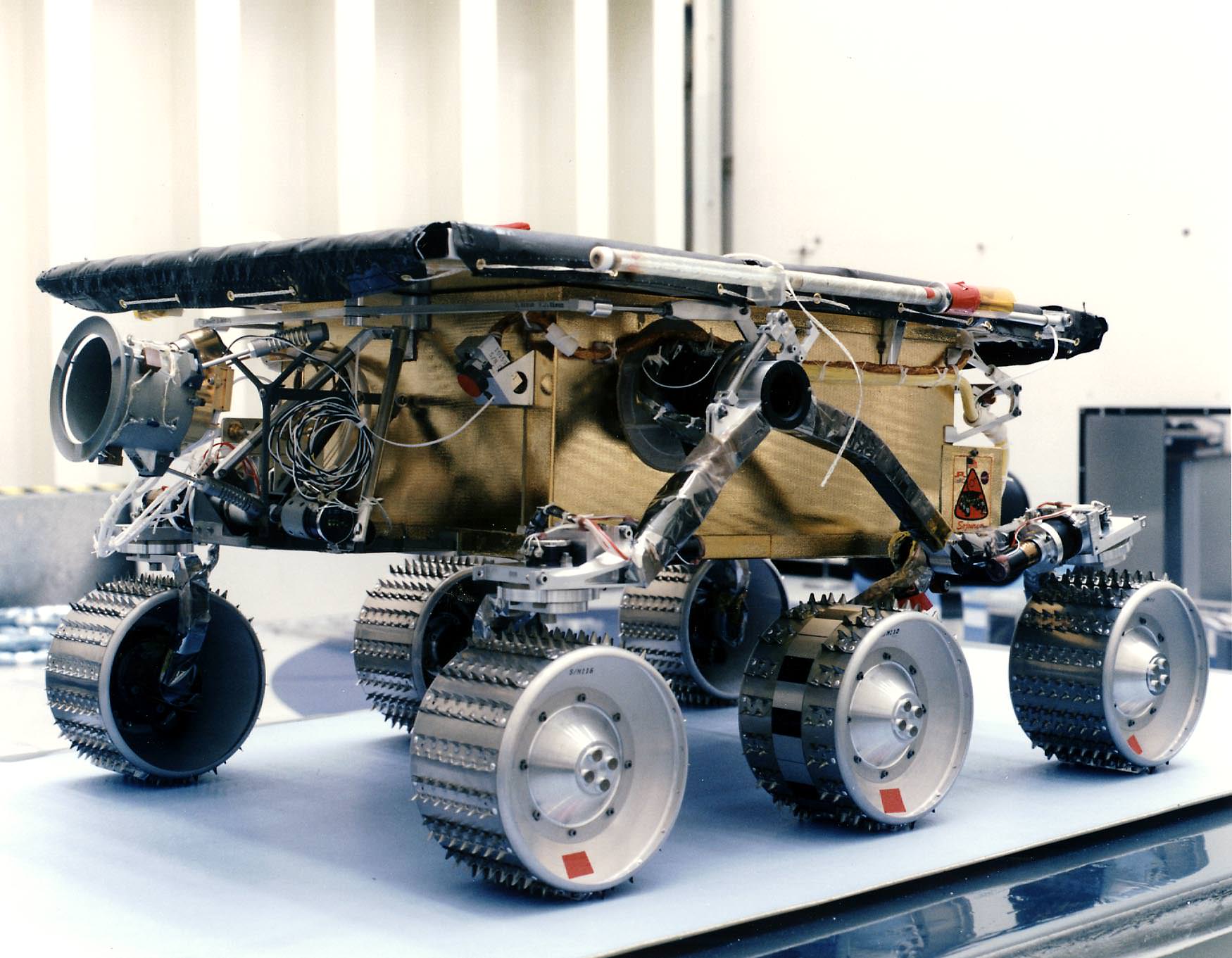
Приведен подробный анализ конструкций движителей планетоходов, начиная с «Лунохода-1». За прошедшие 50 лет российской космической отраслью достигнуты большие успехи в развитии электроники и автоматики, но и этот существенный прогресс не может обеспечить достаточную проходимость планетоходов. В связи с чем актуальным является вопрос правильного выбора движителя для данных аппаратов. Рассмотрены преимущества и недостатки отдельных узлов жестких колес луноходов. Жесткость колеса обеспечивают упругие элементы, а его стойкость к разрушению — материал обода. Для лунохода ограниченного пробега стойкость колеса к разрушению можно не учитывать, но для космического аппарата с пробегом 400 км этот параметр будет определяющим. Описаны открытые и закрытые конструкции колеса. При движении по неподготовленному грунту большое значение для открытого колеса имеет отношение его ширины к диаметру. Отмечено, что наличие грунтозацепов, их форма, количество и высота значительно влияют на тяговые свойства колеса на грунте. Указаны перспективы создания движителей для современных планетоходов.
Литература
[1] Кемурджиан А.Л., ред. Планетоходы. Москва, Машиностроение, 1993. 400 с.
[2] Кемурджиан А.Л., ред. Передвижение по грунтам Луны и планет. Москва, Машиностроение, 1986. 267 с.
[3] Рождественский Ю.Л., Наумов В.Н. Математическая модель взаимодействия металлоупругого колеса с уплотняемым грунтом. Труды МВТУ им. Н.Э. Баумана, 1980, № 284, с. 84–111.
[4] Рождественский Ю.Л., Машков К.Ю. Математическая модель взаимодействия металлоупругого колеса с уплотняемым грунтом в режиме бортового поворота. Труды МВТУ им. Н.Э. Баумана, 1984, № 411, с. 85–108.
[5] Рождественский Ю.Л., Машков К.Ю. О формировании реакций при качении упругого колеса по недеформируемому основанию в режиме бортового поворота. Труды МВТУ им. Н.Э. Баумана, 1982, № 390, c. 56–64.
[6] Забавников Н.А. Исследование бортового поворота колесного транспортного средства методом испытания одиночного колеса. Тракторы и сельхозмашины, 1972, № 1, с. 12–14.
[7] Наумов В.Н., Горелов В.А. Совместный опыт МГТУ им. Н.Э. Баумана и НПО имени С.А. Лавочкина в области создания планетоходов. Вестник НПО имени С.А. Лавочкина, 2017, № 36(2), с. 144–146.
[8] Curiosity Rover. URL: http://www.nasa.gov/mission_pages/msl/index.html (дата обращения 27 сентября 2016).
[9] Second Cycle of Martian Seasons Completing for Curiosity Rover. URL: http://www.nasa.gov/feature/jpl/second-cycle-of-martian-seasons-completing-for-curiosity-rover (дата обращения 27 сентября 2016).
[10] Марсоход Curiosity пробил алюминиевое колесо о горную породу Марса. URL: http://www.newsru.com/arch/world/03feb2014/marsohod.html (дата обращения 27 сентября 2016).
[11] Колеса марсохода «Кьюриосити» разрушаются, и это очень большая проблема. URL: http://hi-news.ru/research-development/kolesa-marsoxoda-kyuriositi-razrushayutsya-i-eto-ochen-bolshaya-problema.html (дата обращения 27 сентября 2016).
[12] Разбор «Марсианина»: техника. URL: http://zelenyikot.com/the-martian-2 (дата обращения 27 сентября 2016).
[13] Марсоход Opportunity работает на Марсе уже 12 лет. URL: https://geektimes.ru/post/269924 (дата обращения 27 сентября 2016).
[14] Эволюция колес на примере марсоходов. URL: https://dirty.ru/evoliutsiia-koles-na-primere-marsokhodov-234914 (дата обращения 27 сентября 2016).
[15] Book Review: Lunar and Planetary Rovers. Universe Today Space and astronomy news. URL: http://www.universetoday.com/wp-content/uploads/2011/09/marspathrov.jpg (дата обращения 27 сентября 2016).
{kind=link}
[16] Haarmann R., Mühlbauer Q., Richter L., Klinkner S., Lee C., Wagner C., Jaumann R., Koncz A., Michaelis H., Schwendner J., Hirschmüller H., Wedler A. Mobile Payload Element (MPE). 2013, 16 p. URL: http://robotics.estec.esa.int/ASTRA/Astra2013/Presentations/Haarmann_2810345.pdf (дата обращения: 27.09.2016).